
La storia dell'innovazione umana è da sempre ispirata all'osservazione della natura, in particolare allo studio del paziente lavoro fatto dalla selezione nel corso di centinaia di milioni di anni per trovare la forma migliore ad una particolare funzione. Dalla prima scintilla catturata dopo un incendio al volo degli uccelli, il sogno umano è sempre stato quello di emulare quello che in natura sembrava essere così semplice. In particolare il sogno di volare è, da che se ne ha memoria storica, la fonte di fascinazione per eccellenza a cui si è abbeverato il genere Homo: dal mito di Icaro agli studi rigorosi ma poco praticabili di Leonardo si è infine arrivati alla pratica con i fratelli Wright che hanno aperto l'era dell'aeronautica moderna.
Ma tanto rimane ancora da imparare sia per quanto riguarda l'aerodinamica che i sistemi di controllo del volo. Un esempio in tal senso viene dallo studio delle api e trova applicazione in un un innovativo sistema di atterraggio completamente indipendente dalla tecnologia attuale, a prova quindi di malfunzionamenti e di hackeraggio dei sistemi.
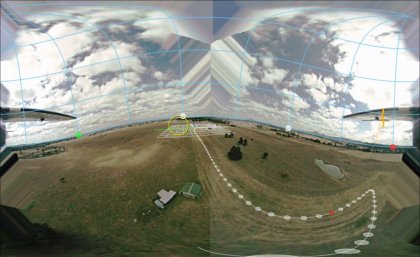 |
| Atterraggio "previsto" dalle telecamere dell'aereo (©Thurrowgood et al) |
Il progetto, coordinato da Saul Thurrowgood del Queensland Brain Institute, ha sviluppato un sistema di atterraggio che si differenzia dalle altre tecniche in uso in quanto è indipendente da sensori a raggio laser, radiofari o segnali GPS. Tutti sistemi che possono essere violati dall'esterno, con conseguenze facilmente prevedibili.
Lo spunto è venuto dallo studio della biologia delle api e di come usano la variazione degli input visivi per calibrare la loro discesa. Dati recenti indicano che questi insetti sfruttano non solo la variazione di posizione del punto di riferimento sottostante ma anche la visione stereoscopica per valutare la distanza dal punto scelto (e quindi variare la propria velocità).
Di seguito il video del test con la visione "ad ape" a sinistra e dall'esterno a destra.
Entrambe queste "procedure di navigazione" sono state integrate nel sistema di atterraggio automatico, opportunamente modificate in modo da essere idonee alle caratteristiche di un velivolo ad ala fissa. Integrazione effettuata mediante telecamere montate nella parte anteriore di un aeromobile di prova di piccole dimensioni (due metri di apertura alare).
Il commento degli australiani è finora positivo "l'aereo ha utilizzato i dati provenienti dai suoi occhi (telecamere) per guidare se stesso, percepire l'altitudine, controllare la velocità e spegnersi una volta atterrato".
Il commento degli australiani è finora positivo "l'aereo ha utilizzato i dati provenienti dai suoi occhi (telecamere) per guidare se stesso, percepire l'altitudine, controllare la velocità e spegnersi una volta atterrato".
E' evidente che lo scopo di questo non è quello di sostituire i sistemi (ottimi) in uso ma di integrarli con sistemi di backup indipendenti. Il malfunzionamento (o la manomissione) di uno di questi potrebbe essere così immediatamente scoperto, fornendo al contempo uno strumento di guida "sicuro".
Questo studio si avvale, e la cosa non stupisce, di finanziamenti forniti dal centro studi degli eserciti americano e australiano oltre che dalla Boeing.
(Altri articoli che trattano sulle applicazioni tecnologiche derivate dallo studio delle api -->"Robobee"
(Altri articoli che trattano sulle applicazioni tecnologiche derivate dallo studio delle api -->"Robobee"
Fonte
- A Biologically Inspired, Vision-based Guidance System for Automatic Landing of a Fixed-wing Aircraft
Saul Thurrowgood et al (2014) Journal of Field Robotics, 31(4) 699–727, July/August 2014

Nessun commento:
Posta un commento